I have tested a 360° camera during the last days.

With that you can make some pretty pictures from scenes with an amazing angle.
Here are some of them.
To view the pictures in full resolution, click here.
Building a 737-800 Homecockpit [OE-LNJ]
using ProSim737
![Building a 737-800 Homecockpit [OE-LNJ]](https://737cockpit.info/wp-content/files/2021/04/v5-clouds.png)
I have tested a 360° camera during the last days.
With that you can make some pretty pictures from scenes with an amazing angle.
Here are some of them.
To view the pictures in full resolution, click here.
Now I have the promised video ready and uploaded.
Enjoy.
httpv://www.youtube.com/watch?v=oxbAhfdNFeA
Short before the Cross the Pond flight I have received my replacement card from Leo Bodnar.
I have wired it with the Throttle axes, and it’s working.
The first flight was accompished during the cross the pond flight and all was working fine.

I will create the long promised video during the next 3 days.
During the wiring of the throttle quadrant I noticed, that the analog inputs are jumping.
httpv://www.youtube.com/watch?v=mjXnen5Cnys
First I thought of FSUIPC mis-calibration, but together with Pete Dowson (the programmer of FSUIPC) we figured out, that the BU0836X card must be defect.
I tried to rewire one analog input to another card – there it’s working.
httpv://www.youtube.com/watch?v=4v8VDPSAaMs
I have contacted Leo Bodnar now, and waiting for a reply to change the defective one with another new card, as the defective was bought back in end of January 2012.
Last week we have finished the maintenance of the throttle. The servos were also built in as well as all cover were reattached.
During the weekend I have wired the throttle and re-wired the pedestal (there were too short cables built in). The whole saturday I spent with soldering the wires…
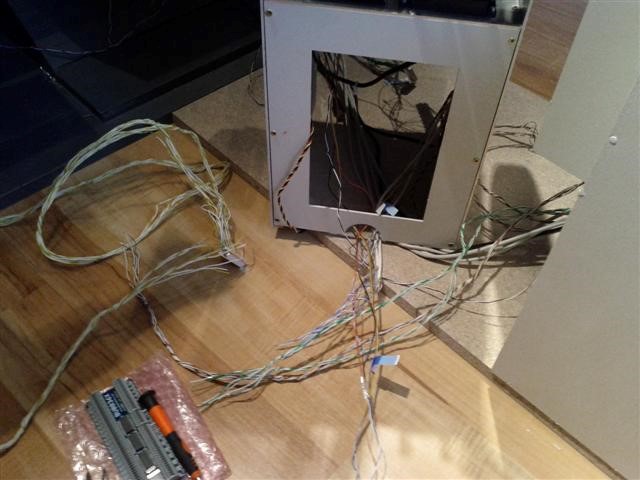

On Sunday I was able to put the parts together and connect it to my machine. I ran into an issue, that the new controller card (the 6th BU0836X card) has got the same id as an existing one in PROSIM. So I had to change all the settings in PROSIM and FSUIPC, this took me 3 hours 🙁

I strugled with the servos. I need to find a solution how the servos get unpowered as soon as the AT disengage is pressed.
I keep you updated and will post some videos once it’s working.
During the last days we tried to get the motor with the clutch working to move the throttle levelers.
Sadly we had to accept that this won’t work as the clutch is too sensitive and would take away too much power so that’s not powerfull enough to move the throttles…
So we decided to move back to plan A. Servos. We successfully installed the servos yesterday and will finish them tomorrow.
I will update the post with some videos and photos once I have them created 🙂
Today I have wired a DC Motor to the OC Motor Card.
httpv://www.youtube.com/watch?v=6HDxyv4XTUA
The motors will be used to automatic move the Throttle Levelers in my Throttle.
Also the mechanic maintenance is finished with the Throttle. Now it moved like it should move 🙂
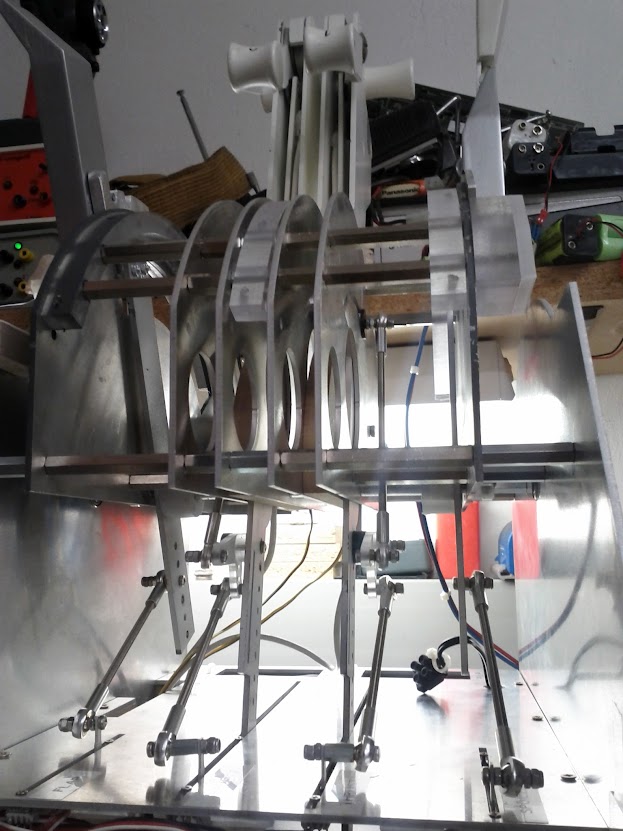
We figured out a slight mechanical problem when we want to start motorizing the throttle.
So we started to disassemble the throttle until we found and fixed the issue.


When we had dismounted the throttle to 90% we found the issue. Some bolts where wrong in their length.

We will change those faulty bolts and assemble it back again. Then we can start with the motors and programming.
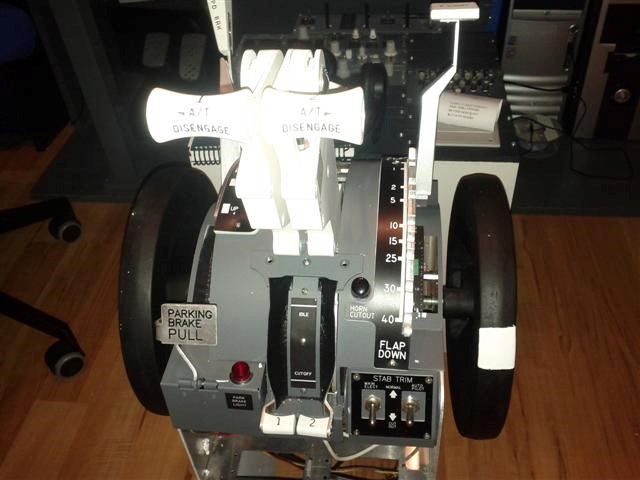
I have now a Throttle 🙂 It arrived today per mail.
I saw the Throttle in a forum, that it will be sold. It is based on the Simparts Kit. Currently its non-motorized, but I want to motorize the throttle with an Opencockpits DC-Motor USB Card as well as some DC-Motors.
It will take a while to have it fully functional, but when it’s finished it will be great 🙂
Of course I will start again to update the blog more frequently as we are starting to work on the Throttle.